For this unit, we took all of the principle we learned from previous units— Kinematics, Forces, Energy, and Momentum— and adapted them for objects moving rotationally. For the previous units, we used the principles for point-like objects, but for rotational motion, we evaluated extended objects, and used rotational principles to evaluate them.
Center of mass
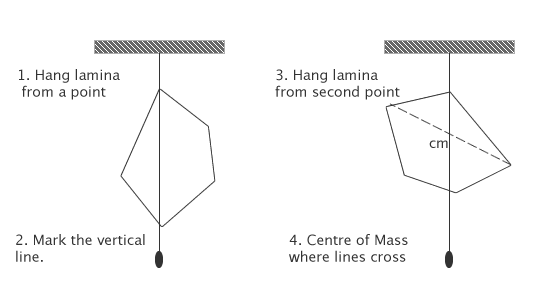
To evaluate objects moving rotationally, you need to find its center of mass. There is probably a more official way to do so, but for our intents and purposes, you can use the hang test to approximate it. A hang test is fairly simple; all you need to do is hang the objects from 2 separate points and draw a line straight downwards for both objects from where they hang. Where the lines intersect is its [approximate] center of mass. On any extended force diagrams, use this as the reference point for the gravitational force acting on the object.
http://www.splung.com/content/sid/2/page/centre_of_mass
Linear to Rotational unit conversion
So far we have dealt with many different units that we used in our various equations. The equations for rotational motion are identical to linear motion, except the variables are swapped for their counterparts. These are the list of important variables and their counterparts:
Position (x) m : Angular position(θ) rads
Velocity (v) m/s : Angular velocity (ω) rads/s
Acceleration (a) m/s/s : Angular acceleration (α)
Force (f) N : Torque (τ) N m
Mass (m) : Angular Inertia (I) kg m^2
Momentum (p) kg m/s : Angular Momentum (L) kg m/s^2
Translational Kinetic Energy (K_e) J : Rotational Kinetic Energy (K_rot) J
Position (x) m : Angular position(θ) rads
Velocity (v) m/s : Angular velocity (ω) rads/s
Acceleration (a) m/s/s : Angular acceleration (α)
Force (f) N : Torque (τ) N m
Mass (m) : Angular Inertia (I) kg m^2
Momentum (p) kg m/s : Angular Momentum (L) kg m/s^2
Translational Kinetic Energy (K_e) J : Rotational Kinetic Energy (K_rot) J
Rotational Kinematics
Objects rotating have the same properties as objects moving linearly, in that they will have a change in position, a velocity, an acceleration, etc. However, as mentioned previously, these have different variables due to their rotational nature. The important equations for this part are just the kinematics equations, with the switched variables (refer to the above section for variable conversions).
Rotational Forces
Similar to Translational Motion, forces can act on rotating objects. These forces are known as Torque. Torque is equal to the distance from the fulcrum (point of rotational) where the force is applied (r) multiplied by the magnitude of the perpendicular force applied to the object. This can be represented by the formula: Torque = radius * (sin(θ) * Force))
Derived from the translational formula, Net Force = m * a, the equation for net torque is: Net Torque = Rotational Inertia * Rotational acceleration
Derived from the translational formula, Net Force = m * a, the equation for net torque is: Net Torque = Rotational Inertia * Rotational acceleration
Rotational Energy & Inertia
Rotational inertia is different for most objects, but for an object that is rotating around in a circle (the most common type of rotation in this unit), the equation is I = mR^2. If another equation is needed, then it will be specified. In this equation you can see that the rotational inertia increases for a greater mass, but increases even more for mass that is farther away from the center of mass. Objects with more rotational inertia resist motion more (just like translational objects). This means that with a disk and a hallow disk of the same mass, a hallow disk will have more rotational inertia, since the mass is averagely farther away from the mass, and will thus have less rotational velocity.
Rotational Kinetic Energy is similar to translational, and can be modeled with the same equation, but with its rotational counterparts: K_rot = 1/2 * I * ω^2. If you solve for ω, then you can see that it's inversely proportional to inertia, and by extension, mass and radius.
Rotational Kinetic Energy is similar to translational, and can be modeled with the same equation, but with its rotational counterparts: K_rot = 1/2 * I * ω^2. If you solve for ω, then you can see that it's inversely proportional to inertia, and by extension, mass and radius.
Rotational Momentum
You get the point by now, rotational momentum is similar to translational momen-- yada yada yada. It is modeled by the variable L, and is the product of rotational inertia and rotational velocity, you know the drill. This can be affected by an impulse, which is (you guessed it!) a torque applied over a time.
Overview
This is the best video to give a complete overview of the subject: it covers all of the topics (AP style) and includes practice problems:
